
Hola Todos.
Disculpen por no mantener el blog actualizado pero he tenido tanta carga de trabajo últimamente que hasta se me dificulta conciliar el sueño. Les comento que los avances han ido un poquito lentos al principio pero hoy pude avanzar bien varias cosas. A continuación resumiré algunas cosas.
Si todo sale bien el día de mañana llegará el tercer pedido a Texas Instruments, el cual tiene una tercera fuente conmutada y 4 Puentes H (solo usaré la fuente y eso a ver), así mismo esta semana debería llegar una copia de Lab View 8.6 asi que para quien quiera instalar la versión de prueba adelante dura unos 30 días creo. Por otro lado espero en dos días aproximadamente llegue un paquete con 6 puentes H ya montados en un circuito impreso para poder montar ya sea en una proto o en placas fenólicas (ya tengo la placa fenólica casi lista así que solo los probaré en la proto y a la placa), lo mas seguro es que los monte con soportes especiales para que los pueda quitar sin tener que soldar o provocar calor inecesario en el impreso.
Mecánica:
Hoy fué un día importnte porque decidí cambiar el método de almacenamiento de cubos (aun no habia hecho bien el que pense primero), esto debido a que la misma plataforma me permite colocar dos pilas de bloques de manera muy efectiva, esto se verá mas claro una vez este terminada la zona de carga y se pueda notar con fotos, el punto es que podrá cargar por separado bloques azules y verdes, así que en caso de cachar mas de uno podrá construir torres de mas de uno sin mover una sola llanta (una vez frente al barco en cuestión), ahora si junta varios de ambos mejor aún podrá descargar todos, solo es cosa de tener cuidado con los bloques rojos. De todas formas ya se tiene bien propuesto el plan de acción a tomar en el escenario, como guiarse y todo paso a paso en diferentes circunstancias. El brazo ya fue completado solo falta un horn que espero me traigan mañana. Así mismo la punta esta casi completa solo falta terminar de montar los electroimanes y algunos detalles de estabilidad del bloque para que se pueda recargar bien en la placa que sostenga los electroimanes. Ya tengo un micro servo que moverá la brújula lejos de los servos y tarjetas para evitar errores en la lectura y todos los demás servos que hacen falta también. Es importante destacar que el brazo finalmente fue hecho de 4 grados de libertad en 2D, permitiendole mas movibilidad ya que con 3 estaba un poco restringido, además así se hará más largo. Aún no he pintado algunas piezas... lo haré si sobra tiempo... que lo dudo :P.
Hardware:
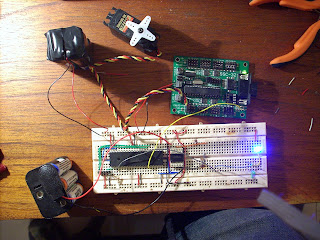
Los dos cerebros ya estan soldados y probados, funcionan muy bien, ya tengo 5 de los 8 sensores infrarrojos a utilizar y solo faltaría el sensor de color y un sensor sharp extra, la placa de sensores ya etsa casi lista solo falta terminar la de las fuentes conmutadas y la de los puentes H, así mismo el area designada para el hardware ya esa bien delimitada y no presenta ningun problema de espacio. Alejandro Pineda me prestó una brújula y así mismo me pasó la función para utilizarla vía I^2C. El control del brazo ya se hace sin mayor problema, al principio costo trabajo calibrar la base ya que consta de dos servos para tener mayor torque no obstante el movimiento de los horns no era lineal cada servo variaba como se le pagaba la gana, a veces menos y aveces más, así que hice una prueba de uno respecto al otro y llene una lista de posiciones en excel la cual usaré como referencia para los MOFS. Por otra parte el sensor SHARP no presntó ningun error de lectura en mi cuarto, estoy empezando a sospechar que el laboratorio por alguna situación quiza porque es tan blanco genere algun error en la lectura, no tengo idea que sucedió con las pruebas hechas en el lab y espero eso no presente un problema demasiado grande en la competencia. Ah y bueno es importante mencionar que el esquemático de la conexión general del hardware ya la diseñé y parece que va a funcionar bien lindo :-D.
Software:
Ya tengo varias funciones de algunos sensores y también ya tengo un bosquejo inicial de la idea de la función de jugador y del main. En este rubro aun no hay mucho que hacer mientras los demás no estén completos.
Por último es importante mencionar el apoyo de mis compañeros y profesores:
Dr. Alejandro Pineda
Ing. Victor Hugo Serrano
Dr. Alejandro Aceves
Ing. Guillermo Villarreal
Ing. Erick Cruz
Dr. Alejandro Sanvicente
Y claro está a mi familia también ;-).
Pero bueno los verdaderos agradecimientos serán para después, hay mucho trabajo por hacer.
Saludos a todos (A media noche desde los labs).
Imagen de inicio: Sensor de color que se va a utilizar ;-).
Sorry por errores ortográficos.. ando cansado jeje.





















 Acoplamiento del motorreductor con la llanta.
Acoplamiento del motorreductor con la llanta. ¡Desde aqui hay una vista hermosa de los volcanes! :-D
¡Desde aqui hay una vista hermosa de los volcanes! :-D


