
Hola a todos.
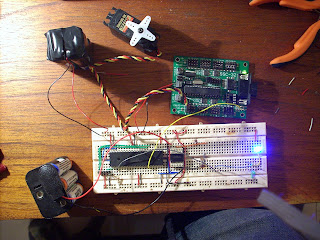
Despues de una gratificante visita al centro de la ciudad de Puebla y algunos de sus alrededores así como visitar viejos amigos pude seguir avanzando con el desarrollo mecánico de la plataforma. Porfin ya se encuentran montados los cuatro servomotores que dan la direccion a los ejes de las llantas. Al principio pensé utilizar una configuración en la cual los ejers de los servomotores estuvieran a distancias iguales, no obstante me comento Victor Hugo que si deseaba obtener un giro en el propio eje del robot debía de tener los servomotores colocados de forma tal que al colocarse en la posicion de rotación tuvieran esa simetría de distancias, no asi cuando se encuentren en movimiento frontal o lateral.

Por otro lado ya comprendí como es que se le indica a la tarjeta controladora de servos las posiciones de cada servo, la instruccion es sencilla y ya la habia usado anteriormente con algunos movimientos de los Bogobots, no obstante la forma de enviarlos por medio de comunicación serial del dsPIC al controlador me resultaba nueva. Es cosa de ver como será la configuración final ya con los sensores la fuente conmutada etc. Quizá mas adelante pueda ponerle un boot loader para poder programar el controlador inalámbricamente.
Por último cabe mencionar que ya conseguí un sensor Sharp, aún no estoy muy seguro de donde lo montaré, no obstante ya vi como opera, mas adelante con más tiempo explicaré el funcionamiento de cada uno de los componentes del robot. Solo queda esperar por que el robot gire correctamente sobre su eje y se desplace en linea recta, eso ya lo veré cuando este de vuelta en México (porcierto hoy por la tarde regreso).

Sin más por el momento me retiro.
Saludos cordiales.
No hay comentarios:
Publicar un comentario